Six fingers that reach everywhere, a magnetic wrist that pops off with a click, and capabilities that look ripped from a sci-fi movie. EPFL's new robotic hand doesn't play by human anatomy rules — it just detaches from the arm and scuttles off on its own to grab whatever you need.
Picture this: a robotic hand that breaks free from human limitations and transforms into a spider. Sounds like Hollywood, but it's 2026 engineering from the Swiss Federal Institute of Technology (EPFL). Aude Billard's team just published in Nature Communications an invention that rewrites what robotic manipulation means. The human hand is usually considered the pinnacle of dexterity. Five fingers, one opposable thumb, countless joints that dance across keyboards or perform intricate surgeries. But evolution had constraints — and that's where technology steps in to fix nature's "bugs."📖 Read more: Soft Robotics: Gentle Robots with a Soft Touch
🔬 Beyond Nature's Limits
"We can easily see the limitations of the human hand when we try to reach objects under furniture or behind shelves," Billard explains. How many times have you twisted your wrist into impossible angles to grab something? Or tried holding a bottle while simultaneously opening a box? EPFL's robotic hand solves these problems with a radical approach: symmetry. Every finger looks identical, turning any pair into "thumbs." Built from 3D-printed materials with silicone tips, the hand can bend in any direction — forward, backward, wherever physics allows.The truth is, nature has already experimented with similar ideas. Octopi use their arms to crawl across the seafloor while simultaneously opening shells. Praying mantises catch prey with the same limbs that move them around. But none of these creatures can completely detach from their bodies.
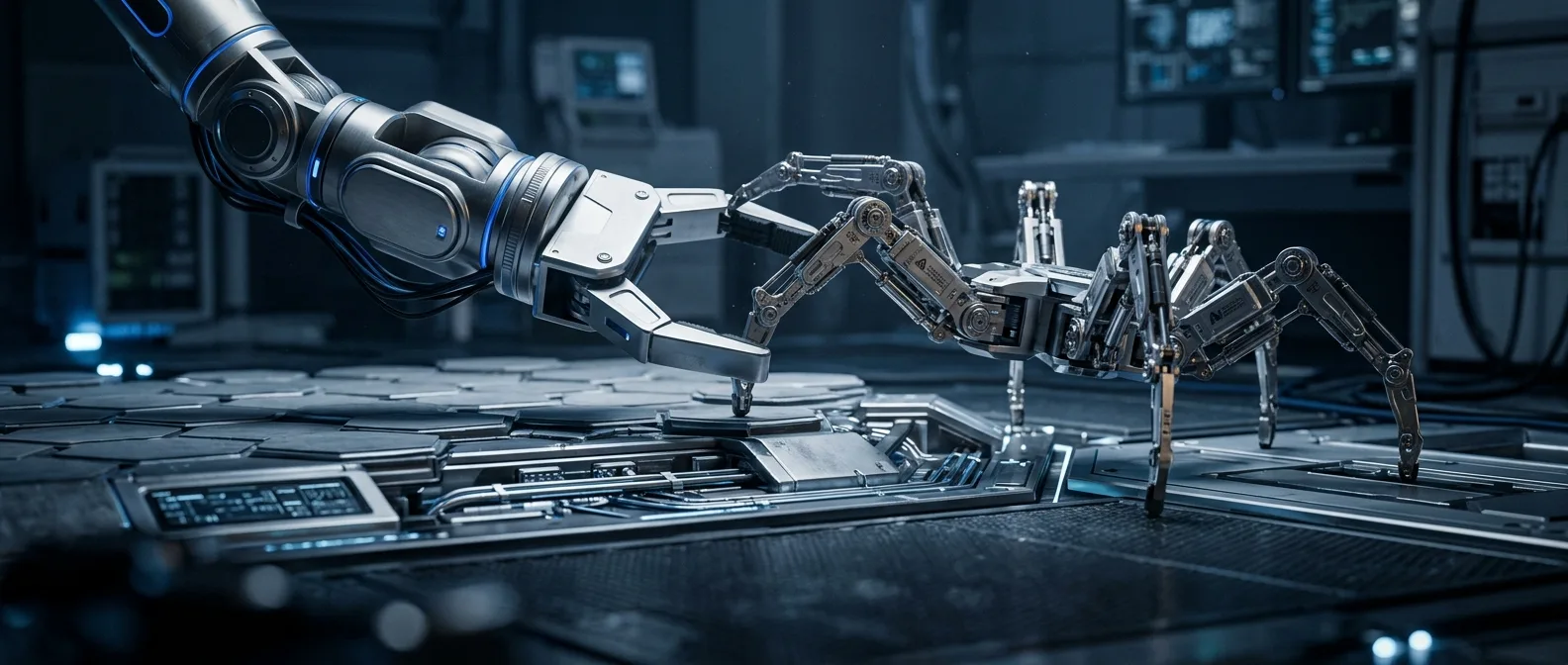
Here's where things get really interesting. Powerful magnets at the "palm" base let the hand snap on and off the robotic arm. When detached, it morphs into a type of robotic spider that runs on its fingertips. In one demonstration, the six-fingered hand grabs three cubes it couldn't reach otherwise. It wraps individual fingers around the first two cubes, then those same fingers squeeze the third cube, and the robot scurries back to the arm running on its remaining fingers.📖 Read more: Swarm Robotics: 1,000 Robots on One Mission
⚡ Magnets and Autonomy
The detachment system works with a "snap-and-lock" mechanism. Magnets help with alignment, a small motor drives a locking bolt. Simple, but effective. Enough to make you wonder why we didn't think of this sooner. But how does this work in practice? Each finger is powered by tiny electric motors and connected with lightweight 3D-printed joints. The result? Fingers that can bend both forward and backward — something that would break our fingers, but for the robot is just another Tuesday.up to 6 Fingers
360° Finger flexion
100% Symmetric design
📖 Read more: Von Neumann Probes: Self-Replicating Spacecraft
🎯 Real-World Applications
Looks impressive in the lab, but where would we actually use this? The researchers see applications in industrial inspections — imagine a hand that explores narrow pipes for rust or leaks. Or in warehouses, where it could reach objects just outside traditional robotic arm range. The truth is, industrial robots have relatively limited mobility. They impress with precision and speed, but they lack flexibility. A robot that can send its "hand" into dangerous or hard-to-reach areas would change quite a bit in industrial automation.But the most exciting prospect might be prosthetics. Studies on humans born with six fingers or who experimented with additional robotic fingers show that the brain quickly assimilates the extra functionality. The result? More dexterity than normal.The symmetric, reversible design works best when tasks demand more than five human fingers can handle.
Aude Billard, EPFL
Industrial Applications
Inspecting tight spaces, machine maintenance, material handling in hard-to-reach spots.
Rescue and Disasters
Exploring debris, retrieving objects from dangerous areas without human presence.
Prosthetics and Augmentation
Prosthetic limbs with superhuman capabilities or additional "hands" for specialized tasks.
📖 Read more: Neuromorphic Chips: Chips That Think Like a Brain
🔄 Genetic Algorithm in Design
How did they land on this design? The team didn't rely solely on intuition. They used a genetic algorithm — a type of artificial intelligence that mimics natural selection — to test thousands of different finger configurations. The system "evolved" through simulations, testing how many fingers are needed for easy locomotion, which arrangement gives maximum grip strength, and how shape affects stability during "spider-walking." Five or six fingers gave the best performance, balancing grip strength and mobility. More than six? The robot started tripping over its own fingers. What's fascinating is that the optimal solution wasn't the obvious one. Eight or ten fingers seem logical for maximum flexibility, but complexity becomes a boomerang. Nature figured this out millions of years ago — there's a reason most mammals have five fingers.🤖 The Future of Robotic Manipulation
Of course, this is still a research prototype. Don't expect to see these robots in Amazon warehouses next year. But it shows a direction that could change how we think about robotics. Most robotic hands try to mimic the human hand as closely as possible. The result? Inferior imitations that can't match human dexterity. EPFL's approach is different: forget human anatomy and design from scratch for optimal performance. This might sound obvious, but in practice it's revolutionary. How many years did we waste trying to copy nature instead of improving it?EPFL's robotic hand was published in Nature Communications in January 2026, with potential applications in both industrial automation and prosthetic technology.
Sure, there are challenges. Battery life, material durability, production costs. And a robot that detaches and runs around on its own will need serious safety systems — what happens if the hand gets "lost" somewhere? But these are problems that get solved with time and investment. The core idea is here, and it works. The robot proves a simple point: the best technology doesn't always copy nature — sometimes it needs to beat it. After millions of years of evolution, maybe it's time we took matters into our own hands — or into robotic hands that detach and crawl around on their own.